17.1 步进电机概念
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。

17.2 步进电机分类
步进电机从其结构形式上可分为反应式步进电机(Variable Reluctance,VR)、永磁式步进电机Permanent Magnet,PM)、混合式步进电机(Hybrid Stepping,HS)。
1.反应式:
定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
2.永磁式
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°),价格较便宜。
3.混合式
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
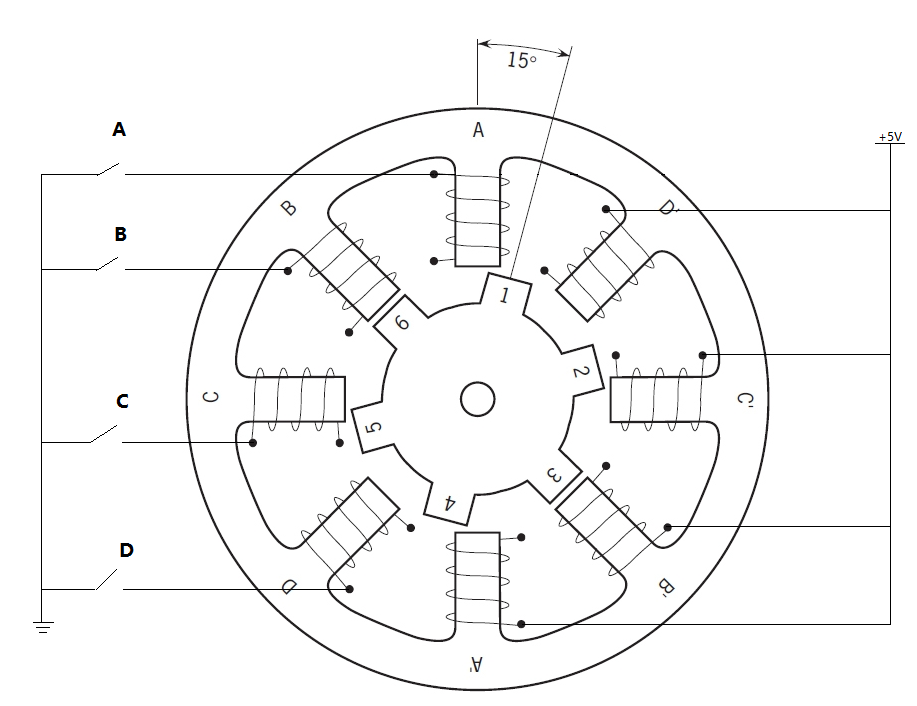 4相步进电机内部结构如上图所示,A,B,C,D四相称为定子,内部1,2,3,4,5,6为永磁铁,称为转子。以转子逆时针旋转为例介绍电机的工作原理。
4相步进电机内部结构如上图所示,A,B,C,D四相称为定子,内部1,2,3,4,5,6为永磁铁,称为转子。以转子逆时针旋转为例介绍电机的工作原理。
假设初始状态如上图所示,B闭合,B相绕阻导通,产生磁性将对定子齿轮产生强有力的吸引,使得B对6吸引,B’对3进行吸引,形成如上图所示的初始状态。而此时转子齿轮1将与定子齿轮A形成一个15°的夹角,2与D’之间形成一个30°的夹角。紧接着我们断开B,闭合A相,A对1产生最大的吸引力,A’对4产生最大的吸引力。最终,A与1对齐,A’与4对齐。相当于转子逆时针转动了15°。此时,2与D’之间的夹角由30°变成了15°。紧接着断开A,闭合D,2与D’对齐,5与D对齐,转子将逆时针再旋转15°。接着断开D,闭合C,转子逆时针旋转15°。因此可以总结为:经过B-A-D-C转子旋转了45°。这个过程称为四节拍。旋转一圈360°需要360°/45°=8个四节拍。因此,可以计算出一个节拍旋转的角度为:360°/(8*4)=11.25°。上述工作模式称为单四拍模式。
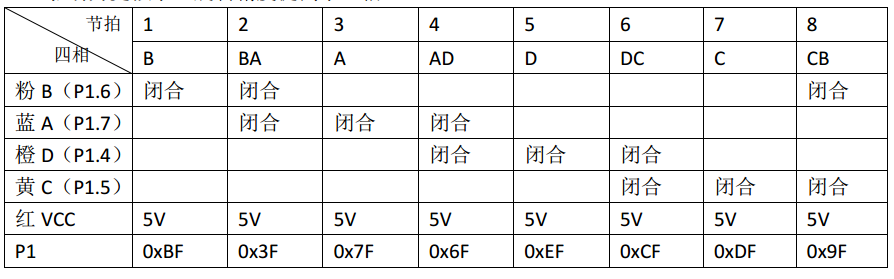
下面在上述的基础之上进行一下改进,假设在两个节拍之间插入一个新的节拍,例如在B断开,A闭合之间插入一个AB同时闭合的节拍,即B-BA-A。此时B对6与A对1具有相同的吸引力,最终将导致6和1之间的中心线将与B和A之间的中心线对齐,相当于转子转了5.625°。 在每个节拍之间插入了一个节拍,即旋转45°由原来的4拍变成了8拍,B-AB-A-AD-D-DC-C-CB。因此,旋转一周360°需要360°/45°*8=64个节拍,每个节拍旋转5.625°。上述模式称为八拍模式,与四拍模式相比,由于增加了拍数使得电机扭矩更大,驱动力更强了,旋转精度提高了一倍。时序如下表所示:
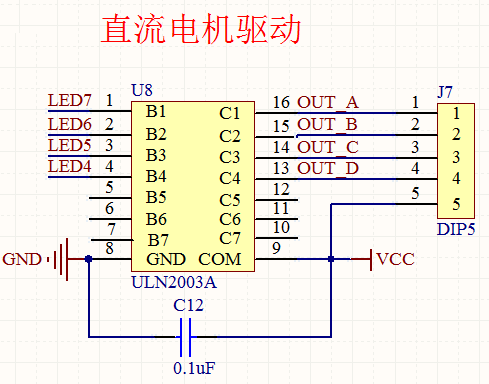
驱动电机需要一定的驱动电流,一般有两种比较简单的驱动电路。一种为使用三极管驱动,一种为采用专用的驱动芯片,我们这里采用的是第二种方法。如上图所示,采用ULN2003A来驱动动直流电机,LED7-LED4为输入端,连接到单片机的I/O口P1.7-P1.4,OUT_A-OUT_D为输出端连接到电机。输入端为高电平时,输出端为高电平,反之亦然。按照上表的时间顺序来驱动电机。那么这里有一个问题大家可能会问,每个节拍的持续时间是多少呢?理论上将节拍持续时间越小电机的转动速度越快。
 该电机的参数表中有一个叫起动频率的参数,≥550 P.P.S,表示,在每秒550个脉冲的情况下,电机可以正常启动。相当于每个脉冲,即每个节拍的持续时间大于等于1/550 = 1.8ms的情况下,电机可以正常转动。按照上述学到的相关内容我们接下来就可以使直流电机转起来了。
该电机的参数表中有一个叫起动频率的参数,≥550 P.P.S,表示,在每秒550个脉冲的情况下,电机可以正常启动。相当于每个脉冲,即每个节拍的持续时间大于等于1/550 = 1.8ms的情况下,电机可以正常转动。按照上述学到的相关内容我们接下来就可以使直流电机转起来了。
17.3 步进电机试验
这里我们利用定时器来实现电机转动的功能,设置一个2ms的定时,每2ms执行一个节拍。根据上面的介绍64个节拍转动一周,一次,转动一周需要2ms*64=128ms,那么可以得到1s可以转7.8周。编写代码如下:
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
uchar code MotorCode[8]={0xBF,0x3F,0x7F,0x6F,0xEF,0xCF,0xDF,0x9F};//电机节拍
#define FOSC 11059200 //单片机晶振频率
#define T_2ms (65536 - FOSC/12*2/1000) //定时器初始值计算
sbit DU = P2^7;//数码管段选、位选引脚定义
sbit WE = P2^6;
void main()
{
P0 = 0;//关闭所有数码管
WE = 1;
WE = 0;
TMOD = 0x01; //定时器工作模式配置
TL0 = T_2ms; //装载初始值
TH0 = T_2ms>>8;
TR0 = 1; //启动定时器
ET0 = 1; //允许定时器中断
EA = 1; //开总中断
while(1);
}
//定时器0中断子程序,定时2ms
void timer0() interrupt 1
{
static uchar index=0;
TL0 = T_2ms;//重装初始值
TH0 = T_2ms>>8;
P1 = MotorCode[index];
index++;
if(index>=8) index=0;
}将程序下载到单片机中,连接好电机。电机转起来了,但是好像有点不对劲,得8s左右才能转一圈,和我们预想的不一致。我们回过头来看电机参数表中有一个减速比1:64,速度减为原来的1/64。把这个考虑进去就和我们的现象吻合了。
下面我们写一个程序,让电机转动指定的角度,前面我们讲过转动一圈需要64个节拍,而减速比为1:64,因此,电机实际转动一圈需要64*64=4096个节拍。所以转动angle度所需的节拍数beats = (angle *4096)/360。根据这个公式编写程序如下:
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
uchar code MotorCode[8]={0xBF,0x3F,0x7F,0x6F,0xEF,0xCF,0xDF,0x9F};//电机节拍
#define FOSC 11059200 //单片机晶振频率
#define T_2ms (65536 - FOSC/12*2/1000) //定时器初始值计算
sbit DU = P2^7;//数码管段选、位选引脚定义
sbit WE = P2^6;
unsigned long angle = 180;
unsigned beats = 0;
void main()
{
P0 = 0;//关闭所有数码管
WE = 1;
WE = 0;
beats = (angle * 4096) /360; //计算节拍数
TMOD = 0x01; //定时器工作模式配置
TL0 = T_2ms; //装载初始值
TH0 = T_2ms>>8;
TR0 = 1; //启动定时器
ET0 = 1; //允许定时器中断
EA = 1; //开总中断
while(1);
}
//定时器0中断子程序,定时2ms
void timer0() interrupt 1
{
static uchar index=0;
TL0 = T_2ms;//重装初始值
TH0 = T_2ms>>8;
if(beats != 0 )
{
P1 = MotorCode[index];
index++;
if(index>=8) index=0;
beats--;
}
}17.4 小结
本章详细介绍了步进电机的工作原理及简单应用。
所属系列
从当前文章继续阅读它所在合集中的前后内容。
本专栏C语言开发为基础,旨在深入解析51单片机技术开发,嵌入式C语言编程。 订阅了本专栏您将可以收获的技能: 1. 系统学习 51单片机开发 2. 掌握嵌入式C语言开发流程 3. 深度剖析51单片机工作原理 4. 了解更多嵌入式开发原理、流程 适宜人群: 1. 所有想了解 51单片机开发的人 2. 从事嵌入式开发的工程师 3. 想要了解C语言、单片机等技术之外的内容的人 作为订阅福利,我们建立了微信技术交流群,大家在这里可以认识更多做朋友。需要的朋友加微信:「RYMCU交流1群」。欢迎关注微信公众号「rymcucom」,订阅最新内容。
相关文章
优先推荐同专题、同标签和同作者内容,补足热门文章。
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22126.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2264%22%20font-weight%3D%22700%22%3Eesp-idf%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22219.2%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2264%22%20font-weight%3D%22700%22%3Evscode%E5%B7%A5%E7%A8%8B%E6%8A%A5%E9%94%99%E6%89%BE%E4%B8%8D%E5%88%B0%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22312.0%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2264%22%20font-weight%3D%22700%22%3E%E6%A0%87%E5%87%86%E5%BA%93%E5%A4%B4%E6%96%87%E4%BB%B6%E8%A7%A3%E5%86%B3%E5%8A%9E%E6%B3%95%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22128.7%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3Evscode%E4%B8%8B%E4%BD%BF%E7%94%A8platfor%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22218.6%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3Emio%E5%BC%80%E5%8F%91STM32%E5%A6%82%E6%9E%9C%E5%B0%86.b%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22308.5%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3Ein%E6%96%87%E4%BB%B6%E6%94%BE%E5%88%B0%E5%B7%A5%E7%A8%8B%E6%A0%B9%E7%9B%AE%E5%BD%95%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%2295.0%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2256%22%20font-weight%3D%22700%22%3ENebula%20Pi%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22176.2%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2256%22%20font-weight%3D%22700%22%3E%E5%BC%80%E5%8F%91%E6%9D%BF%E8%BF%9B%E9%98%B6%E6%95%99%E7%A8%8B%EF%BC%88%E4%BA%8C%EF%BC%89%E2%80%94%E2%80%94%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22257.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2256%22%20font-weight%3D%22700%22%3E%E8%B6%85%E5%A3%B0%E6%B3%A2%E6%B5%8B%E8%B7%9D%E6%A8%A1%E5%9D%97HC-SR04%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22338.6%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2256%22%20font-weight%3D%22700%22%3E%E7%9A%84%E4%BD%BF%E7%94%A8%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22128.7%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3ENebula%20Pi%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22218.6%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3E%E5%BC%80%E5%8F%91%E6%9D%BF%E8%BF%9B%E9%98%B6%E6%95%99%E7%A8%8B%EF%BC%88%E4%B8%80%EF%BC%89%E2%80%94%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22308.5%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3E%E2%80%94LCD1602%E5%AE%9E%E7%8E%B0%E6%BB%9A%E5%8A%A8%E6%98%BE%E7%A4%BA%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22169.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E7%AC%AC%2020%20%E7%AB%A0%200.96%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22273.8%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3EOLED%20%E4%BD%BF%E7%94%A8%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22169.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E7%AC%AC%2019%20%E7%AB%A0%20%E5%86%85%E9%83%A8%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22273.8%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3EE2PROM%20%E8%AF%BB%E5%86%99%E5%AE%9E%E9%AA%8C%3C%2Ftext%3E%0A%3C%2Fsvg%3E)