前言
本章介绍红外遥控通信试验,通过本章的学习掌握红外遥控器的编码原理以及使用。在 Nebula-Pi 单片机开发板上,配备了一个红外信号接收头,用于接收红外信号,开发板配套了一个红外遥控器,用于发送红外数据。
16.1 红外遥控原理简介
红外遥控是一种无线、非接触式数据传输技术、具有成本低、抗干扰能力强的短距离通信技术、被广泛的应用于电子设备遥控通信中,包括电视、空调、手机等多种电子设备中,具有广泛的应用前景。
红外通信原理为将信息加载到红外光波中,利用发射装置发射出去,接收设备接收到红外光后将信息解码并做出相应的操作,便完成了一次红外光通信。我们以一个生活中常见的例子为例,当两个在黑暗中的人,一人拿着手电筒通过不停的开关闪烁手电筒将信息传递给对方。而我们这里使用的是红外光,它的优点为红外光不可见,对周围环境影响较小,另外由于红外光波长远小于其它常用无线电波长,因此,对其它无线通信电子设备无影响。怎样将信息加载到红外光上呢?这就是我们常说的红外遥控编码协议了,目前常用的有 Philips RC-5Protocol、Sharp 协议、 NEC 协议等。我们这例重点讲解 NEC 协议。
在数字通信中最小的信息单位为 bit,即为 "0" 或 "1" ,那么在红外通信协议中是怎么表示逻辑 "0" 和 "1" 的呢?该协议中以发射红外载波的占空比代表信息 "0" 和 "1" 。
逻辑 "0" 的表示法为:560us 的连续载波+560us 的低电平,总时长为1.125ms。
逻辑 "1" 的表示法为:560us 的连续载波+1680us 的低电平,总时长为2.25ms。
其中载波为 38KHz 的方波,逻辑 "0" 和逻辑 "1" 表示法如下图所示:
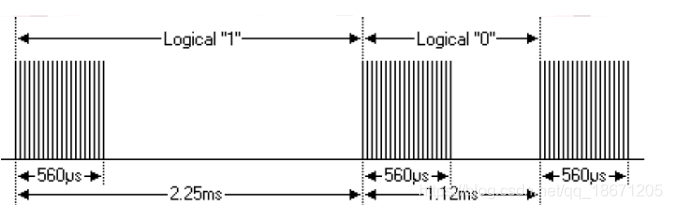
图 16-1 NEC 协议逻辑 "0" 和逻辑 "1" 表示法
传输一帧 NEC 格式的数据包括以下内容:
- 同步码头:9ms 载波+4.5ms 低电平;
- 用户码:用户自定义的 8bit 数据;
- 用户反码:8bit 用户码按位取反;
- 数据码:8bit 数据,也称为8位按键数据码;
- 数据反码:8bit 数据码按位取反。
由上面内容可知,实际传输的数据内容为用户码和数据码,上面的反码用于数据校验,确保数据传输的可靠性,数据按低位到高位的顺序一次传输。传输一帧 NEC 数据格式如下图所示:

或者

图 16-2 NEC 传输数据帧格式
上图为 NEC 发送模块通过红外光发送的数据,当接收模块接收到 38KHz 的载波时输出低电平,其它情况输出高电平,和发出来的正好相反。
因此,单片机通过测量接收到的电平高低持续时间便可解码数据了。例如当单片机接收到 9ms 低电平+4.5ms 高电平时,即接收到了引导码。当接收到 560us 低电平+ 560us 高电平表示接收到了数据 "0",当接收到 560us 低电平+1680us 高电平表示接收到了数据 "1",依照上述模式便可完成一帧数据的接收。
16.2 红外接收硬件电路设计
Nebula Pi 开发板板载了红外信号接收模块 VS1838B,模块外形图如下图左边所示,电路连接图如下图右边所示。其中,输出引脚与单片机的 P3.3 引脚相连接,同时该引脚为单片机的外部中断1输入引脚。因此,可以利用单片机的外部中断1来处理红外数据接收。

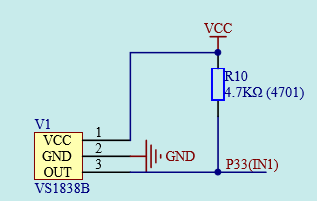
16-3 红外接收模块硬件电路
开发板配套的红外遥控器如下图所示:

图 16-4 红外遥控器
16.3 红外解码试验
红外解码软件编写步骤如下:
- 首先进行初始化将外部中断1设置为下降沿触发,当接收到的红外信号由高电平变为低电平时,表明一帧红外数据的开始;
- 在外部中断1子程序中判断引导码的正确性,判读的方法为通过定时器计数来计算高低电平持续的时间,并分别与引导码规定时间进行对比;
- 当超出了规定时间范围,我们认为这不是一帧标准的红外遥控数据,便直接返回跳出中断子程序;
- 当符合要求后,继续往下执行,并判断和接收4个字节的数据,将接收到的数据存放到指定存储变量中,并置位红外标志位;
- 在主程序中查询这个标志位来确定是否收到了红外数据,将数据从存储变量中取出进行相关联的操作。
根据上述原则编写红外驱动头文件 HongWai.h如下:
#ifndef __IR_H__
#define __IR_H__
extern void InitIR(); // 初始化定时器 TR0,外部中断1
extern bit Flag_IR; // 按键标志位
extern unsigned long Data_IR;//4 个字节的数据:[31:0]数据反码->数据码->用户反码->用户码
#endif图 16-5 红外遥控头文件
驱动文件 HongWai.c代码如下:
#include <reg52.h>
#define HIGH_IR 1 // 高电平
#define LOW_IR 0 // 低电平
#define Min_9ms 8000 //8ms
#define Max_9ms 10000 //10ms
#define Min_4_5ms 3500 //3.5ms
#define Max_4_5ms 5000 //5ms
#define Min_560us 300 //300us
#define Max_560us 700 //700us
#define Min_1680us 1300 //1.3ms
#define Max_1680us 1800 //1.8ms
#define Time_16ms 16000 //16ms
sbit Led1 = P1^1;
sbit IR_in = P3^3;// 红外接收引脚,也是外部中断1输入脚
bit Flag_IR = 0;// 红外接收标志,收到正确帧数据后,由程序置1
unsigned long Data_IR;//4 个字节的数据:[31:0]数据反码->数据码->用户反码->用户码
// 红外接收初始化
void InitIR()
{
IR_in = 1;// 释放
TMOD &= 0xF0;// 清零 T0 控制位
TMOD |= 0x01;// 配置 T0 为模式1
TR0 = 0; // 停止 T0 记数
ET0 = 0;// 关定时器0中断
IT1 = 1;// 设置 INT1 为下降沿触发
EX1 = 1;// 开 INT1 中断
EA=1; // 开总中断
}
unsigned int T_Count(bit flag)// 电平计时器
{
TH0 = 0; // 清零 T0
TL0 = 0;
TR0 = 1;// 启动 T0
// 判断高电平是否超过 16ms,若超过定义为异常,直接跳出循环,防止进入死循环
while(IR_in==flag){if(TH0 >= (Time_16ms>>8)) break;}
TR0 = 0;
return (TH0*256 + TL0);// 返回计数值,数值单位为 us
}
// 外部中断1,中断子程序,下降沿触发进入中断
void Int1() interrupt 2
{
unsigned int i;
unsigned int T_Low,T_High;
T_Low = T_Count( LOW_IR);// 接收 9ms 的引导码低电平
T_High = T_Count(HIGH_IR);// 接收4.5ms 引导码高电平
// 判断引导码正确性
if(T_Low<Min_9ms || T_Low>Max_9ms || T_High<Min_4_5ms || T_High >Max_4_5ms){IE1=0; return;}
// 接收4个字节的数据,共 32 位
for(i=0;i<32;i++)
{
T_Low = T_Count( LOW_IR);// 接收 560us 位低电平
T_High = T_Count(HIGH_IR);// 接收 560us 或 1680us 位高电平
// 判读位电平的正确性
if(T_Low<Min_560us || T_Low>Max_560us || T_High<Min_560us | | T_High>Max_1680us) {IE1=0;return;}
Data_IR>>=1; // 为0时高位补0
if(T_High>Min_1680us) Data_IR |= 0x80000000;// 为1,高位置1
}
Flag_IR = 1; // 接收到按键值后,置位
IE1=0;// 清楚中断标志位,确保在响应外部中断0过程中产生的外部中断请求 不再被响应。
}图 16-6 红外遥控.c文件代码
编写主函数 MainIR.c,功能为将接收到的按键值显示到 1602 液晶显示器,代码如下:
/*****************************************************************
* 红外接收显示测试
* ****************************************************************
* 【主芯片】:STC89SC52/STC12C5A60S2
* 【主频率】: 11.0592MHz
*
* 【版 本】: V1.0
* 【作 者】: stephenhugh
* 【网 站】:https://rymcu.taobao.com/
* 【邮 箱】:
*
* 【版 权】All Rights Reserved
* 【声 明】此程序仅用于学习与参考,引用请注明版权和作者信息!
*
****************************************************************/
#include <reg52.h>
#include <HongWai.h>
#include <Drive_1602.h>
unsigned char *Key_Str=0;
void main()
{
unsigned char Key;
Init_1602();//1602 初始化
Disp_1602_str(1,2, "Nebula-Pi IR");// 第1行第2列显示 "Nebula-Pi IR"
Disp_1602_str(2,1,"KEY:");// 第1行第2列开始显示
InitIR();
while(1)
{
if(Flag_IR)
{
Flag_IR = 0;
Key = (unsigned char)(Data_IR>>16);// 数据码
switch(Key)
{
case 69:Key_Str = "CH-";break;
case 70:Key_Str = "CH";break;
case 71:Key_Str = "CH+";break;
case 68:Key_Str = "PREV";break;
case 64:Key_Str = "NEXT";break;
case 67:Key_Str = "PLAY/PAUSE";break;
case 7:Key_Str = "-";break;
case 21 :Key_Str = "+";break;
case 9:Key_Str = "EQ";break;
case 22:Key_Str = "0";break;
case 25:Key_Str = "100+";break;
case 13:Key_Str = "200+";break;
case 12:Key_Str = "1";break;
case 24:Key_Str = "2";break;
case 94:Key_Str = "3";break;
case 8:Key_Str = "4";break;
case 28:Key_Str = "5";break;
case 90:Key_Str = "6";break;
case 66:Key_Str = "7";break;
case 82:Key_Str = "8";break;
case 74:Key_Str = "9";break;
default:Key_Str = "error!";
}
Disp_1602_str(2,5," ");
Disp_1602_str(2,5,Key_Str);
}
}
}图 16-7 红外遥控主函数代码
下载程序后,按遥控器不同的按键,观察 1602 液晶显示器的显示结果:
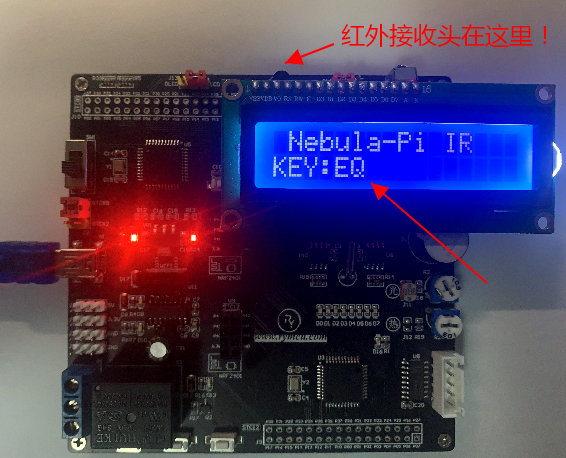
图 16-8 红外遥控器接收显示结果
16.4 本章小结
本章学习了红外遥控器的通信原理,并且实现红外信号的接收与解码。
所属系列
从当前文章继续阅读它所在合集中的前后内容。
> 本作品集内教程基于 [Hugh](https://rymcu.com/user/hugh) 的创作基础上进行修订发布 关于我~和昊楠君~(昊楠君已经阵亡了,现在和 Hugh )学嵌入式开发这件事。
相关文章
优先推荐同专题、同标签和同作者内容,补足热门文章。
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22126.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2264%22%20font-weight%3D%22700%22%3Eesp-idf%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22219.2%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2264%22%20font-weight%3D%22700%22%3Evscode%E5%B7%A5%E7%A8%8B%E6%8A%A5%E9%94%99%E6%89%BE%E4%B8%8D%E5%88%B0%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22312.0%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2264%22%20font-weight%3D%22700%22%3E%E6%A0%87%E5%87%86%E5%BA%93%E5%A4%B4%E6%96%87%E4%BB%B6%E8%A7%A3%E5%86%B3%E5%8A%9E%E6%B3%95%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22128.7%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3Evscode%E4%B8%8B%E4%BD%BF%E7%94%A8platfor%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22218.6%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3Emio%E5%BC%80%E5%8F%91STM32%E5%A6%82%E6%9E%9C%E5%B0%86.b%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22308.5%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3Ein%E6%96%87%E4%BB%B6%E6%94%BE%E5%88%B0%E5%B7%A5%E7%A8%8B%E6%A0%B9%E7%9B%AE%E5%BD%95%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%2295.0%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2256%22%20font-weight%3D%22700%22%3ENebula%20Pi%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22176.2%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2256%22%20font-weight%3D%22700%22%3E%E5%BC%80%E5%8F%91%E6%9D%BF%E8%BF%9B%E9%98%B6%E6%95%99%E7%A8%8B%EF%BC%88%E4%BA%8C%EF%BC%89%E2%80%94%E2%80%94%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22257.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2256%22%20font-weight%3D%22700%22%3E%E8%B6%85%E5%A3%B0%E6%B3%A2%E6%B5%8B%E8%B7%9D%E6%A8%A1%E5%9D%97HC-SR04%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22338.6%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2256%22%20font-weight%3D%22700%22%3E%E7%9A%84%E4%BD%BF%E7%94%A8%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22128.7%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3ENebula%20Pi%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22218.6%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3E%E5%BC%80%E5%8F%91%E6%9D%BF%E8%BF%9B%E9%98%B6%E6%95%99%E7%A8%8B%EF%BC%88%E4%B8%80%EF%BC%89%E2%80%94%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22308.5%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2262%22%20font-weight%3D%22700%22%3E%E2%80%94LCD1602%E5%AE%9E%E7%8E%B0%E6%BB%9A%E5%8A%A8%E6%98%BE%E7%A4%BA%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22169.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E7%AC%AC%2020%20%E7%AB%A0%200.96%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22273.8%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3EOLED%20%E4%BD%BF%E7%94%A8%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22169.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E7%AC%AC%2019%20%E7%AB%A0%20%E5%86%85%E9%83%A8%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22273.8%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3EE2PROM%20%E8%AF%BB%E5%86%99%E5%AE%9E%E9%AA%8C%3C%2Ftext%3E%0A%3C%2Fsvg%3E)