在星允派Nebula Pi,使用STM32F103上进行 AD 电压采集,使用 ADC1。
- 硬件
确定采集引脚:选择 ADC1 的一个通道对应的 GPIO 引脚, PA(ADC1_IN0)。将需要采集的电压信号连接到该引脚。
参考电压:确保芯片的参考电压(VREF+)稳定,通常连接到 3.3V 电源,VREF-接地。
- 软件配置
时钟配置
使能 ADC1 时钟:在 STM32 的时钟控制寄存器中,使能 ADC1 的时钟。在使用 HAL 库的情况下,可以通过__HAL_RCC_ADC1_CLK_ENABLE()函数来实现。
配置 ADC 时钟分频:根据系统时钟和 ADC 的工作频率要求,配置 ADC 的时钟分频系数。
GPIO 配置
设置引脚为模拟输入模式:将对应的 GPIO 引脚 PA配置为模拟输入模式。在 HAL 库中,可以使用 GPIO_InitTypeDef 结构体进行配置,模式选择 GPIO_MODE_ANALOG。
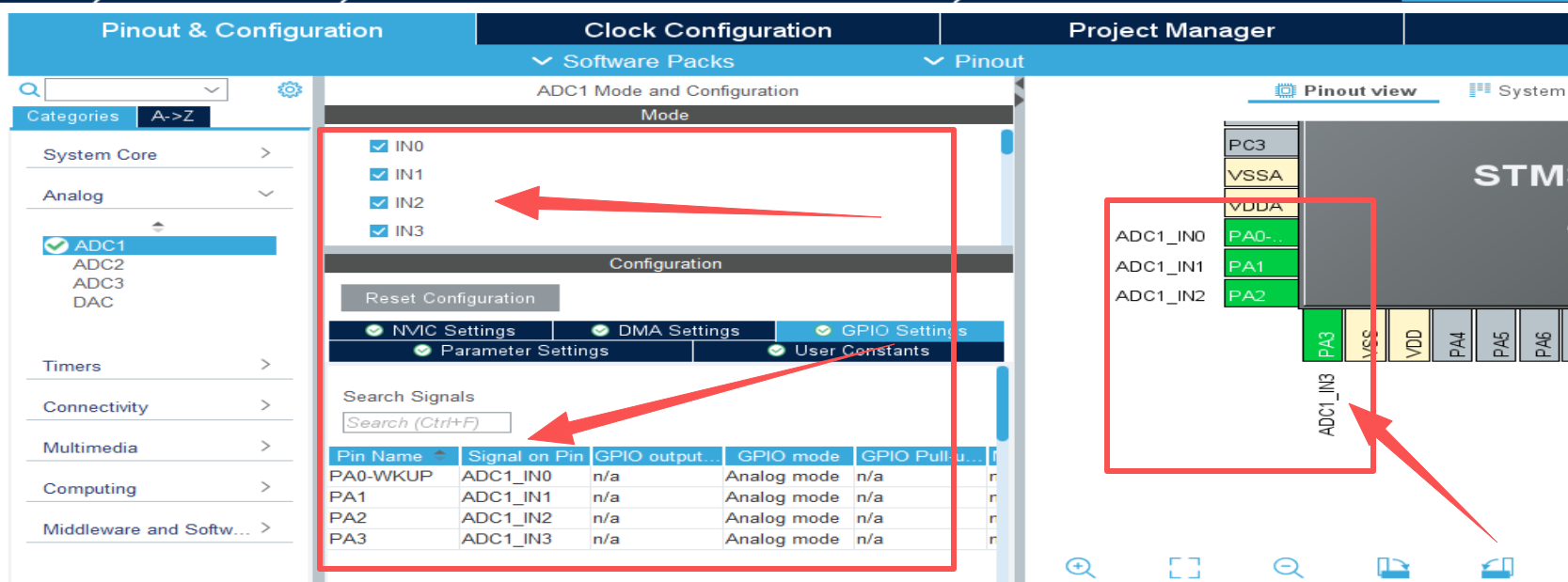
ADC 配置
初始化 ADC 参数:使用 HAL 库的 ADC_InitTypeDef 结构体来配置 ADC 的参数,如扫描模式、连续转换模式、数据对齐方式等。
配置 ADC 通道:选择要使用的 ADC 通道 ADC_CHANNEL_0,并设置采样时间。
校准 ADC:在进行采集之前,对 ADC 进行校准,以提高采集精度。可以使用 HAL_ADCEx_Calibration_Start()函数进行校准。
- 数据采集
启动 ADC 转换:使用 HAL_ADC_Start()函数启动 ADC 转换。
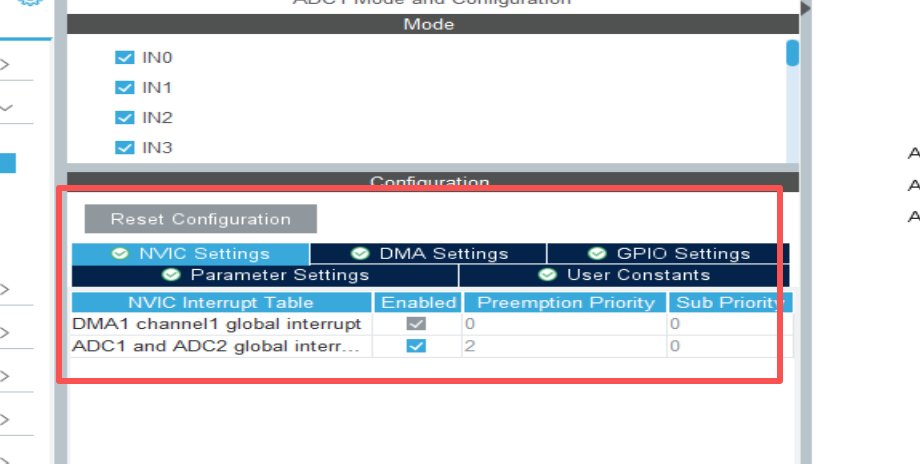
等待转换完成:可以通过轮询 HAL_ADC_PollForConversion()函数或者使用中断方式等待转换完成。
读取采集结果:转换完成后,使用 HAL_ADC_GetValue()函数读取采集到的数字值。
4.代码
MX_GPIO_Init();
MX_DMA_Init();
MX_ADC1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_ADCEx_Calibration_Start(&hadc1);
HAL_Delay(200);
HAL_ADC_Start_DMA(&hadc1,(uint32_t*)ADC_buffer,4);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
for(int i = 0; i < 4; i++)
{
printf("ADCbuffer%d: %d \r\n", i, ADC_buffer[i]);
HAL_Delay(100);
printf("ADCValue%d: %f \r\n", i, (ADC_buffer[i]) * 3.3 / 4095);
HAL_Delay(100);
SEGGER_RTT_WriteString(0, "Hello World from SEGGER!666\r\n");
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspInit 0 */
/* USER CODE END ADC1_MspInit 0 */
/* ADC1 clock enable */
__HAL_RCC_ADC1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**ADC1 GPIO Configuration
PA0-WKUP ------> ADC1_IN0
PA1 ------> ADC1_IN1
PA2 ------> ADC1_IN2
PA3 ------> ADC1_IN3
*/
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* ADC1 DMA Init */
/* ADC1 Init */
hdma_adc1.Instance = DMA1_Channel1;
hdma_adc1.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_adc1.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_adc1.Init.MemInc = DMA_MINC_ENABLE;
hdma_adc1.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_adc1.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_adc1.Init.Mode = DMA_CIRCULAR;
hdma_adc1.Init.Priority = DMA_PRIORITY_LOW;
if (HAL_DMA_Init(&hdma_adc1) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(adcHandle,DMA_Handle,hdma_adc1);
/* ADC1 interrupt Init */
HAL_NVIC_SetPriority(ADC1_2_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(ADC1_2_IRQn);
/* USER CODE BEGIN ADC1_MspInit 1 */
/* USER CODE END ADC1_MspInit 1 */
}
}
void HAL_ADC_MspDeInit(ADC_HandleTypeDef* adcHandle)
{
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspDeInit 0 */
/* USER CODE END ADC1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_ADC1_CLK_DISABLE();
/**ADC1 GPIO Configuration
PA0-WKUP ------> ADC1_IN0
PA1 ------> ADC1_IN1
PA2 ------> ADC1_IN2
PA3 ------> ADC1_IN3
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3);
/* ADC1 DMA DeInit */
HAL_DMA_DeInit(adcHandle->DMA_Handle);
/* ADC1 interrupt Deinit */
HAL_NVIC_DisableIRQ(ADC1_2_IRQn);
/* USER CODE BEGIN ADC1_MspDeInit 1 */
/* USER CODE END ADC1_MspDeInit 1 */
}
}
ADC_HandleTypeDef hadc1;
DMA_HandleTypeDef hdma_adc1;
/* ADC1 init function */
void MX_ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Common config
*/
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_ENABLE;
hadc1.Init.ContinuousConvMode = ENABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 4;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_239CYCLES_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_1;
sConfig.Rank = ADC_REGULAR_RANK_2;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_2;
sConfig.Rank = ADC_REGULAR_RANK_3;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_3;
sConfig.Rank = ADC_REGULAR_RANK_4;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC1_Init 2 */
/* USER CODE END ADC1_Init 2 */
}5.打印出来的信息

相关文章
优先推荐同专题、同标签和同作者内容,补足热门文章。
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22117.2%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E6%98%9F%E5%85%81%E6%B4%BE%20F103%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22221.6%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E5%85%AC%E6%B5%8B%E6%B4%BB%E5%8A%A8%E5%9C%86%E6%BB%A1%E6%94%B6%E5%AE%98%EF%BC%81%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22326.0%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E8%87%B4%E6%95%AC%E6%AF%8F%E4%B8%80%E4%BD%8D%E5%85%88%E8%A1%8C%E8%80%85%EF%BC%81%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
![星允派(NEBULA PI) [四] 软件I2C驱动SHT30](data:image/svg+xml,%3Csvg%20xmlns%3D%22http%3A%2F%2Fwww.w3.org%2F2000%2Fsvg%22%20width%3D%22800%22%20height%3D%22400%22%20viewBox%3D%220%200%20800%20400%22%3E%0A%20%20%3Cstyle%3E%0A%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%23f1f5f9%3B%20%7D%0A%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%23e2e8f0%3B%20%7D%0A%20%20%20%20.ph-title%20%7B%20fill%3A%20%23475569%3B%20%7D%0A%20%20%20%20%40media%20(prefers-color-scheme%3A%20dark)%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22117.2%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E6%98%9F%E5%85%81%E6%B4%BE(NEBULA%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22221.6%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3EPI)%20%5B%E5%9B%9B%5D%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22326.0%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E8%BD%AF%E4%BB%B6I2C%E9%A9%B1%E5%8A%A8SHT30%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22169.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E6%98%9F%E5%85%81%E6%B4%BE(nebula%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22273.8%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3Epi)%20-WA2812%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22169.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E6%98%9F%E5%85%81%E6%B4%BE(stm32f103%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22273.8%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E)%20(%E5%9B%9B)%E9%A9%B1%E5%8A%A8%E8%88%B5%E6%9C%BA%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22169.4%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E6%98%9F%E5%85%81%E6%B4%BE(nebula%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22273.8%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3Epi)%20OLED%3C%2Ftext%3E%0A%3C%2Fsvg%3E)
%20%7B%0A%20%20%20%20%20%20.ph-from%20%7B%20stop-color%3A%20%231e293b%3B%20%7D%0A%20%20%20%20%20%20.ph-to%20%7B%20stop-color%3A%20%230f172a%3B%20%7D%0A%20%20%20%20%20%20.ph-title%20%7B%20fill%3A%20%23cbd5e1%3B%20%7D%0A%20%20%20%20%7D%0A%20%20%3C%2Fstyle%3E%0A%20%20%3Cdefs%3E%0A%20%20%20%20%3ClinearGradient%20id%3D%22g%22%20x1%3D%220%25%22%20y1%3D%220%25%22%20x2%3D%22100%25%22%20y2%3D%22100%25%22%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-from%22%20offset%3D%220%25%22%2F%3E%0A%20%20%20%20%20%20%3Cstop%20class%3D%22ph-to%22%20offset%3D%22100%25%22%2F%3E%0A%20%20%20%20%3C%2FlinearGradient%3E%0A%20%20%3C%2Fdefs%3E%0A%20%20%3Crect%20width%3D%22800%22%20height%3D%22400%22%20fill%3D%22url(%23g)%22%2F%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22117.2%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%E6%98%9F%E5%85%81%E6%B4%BE(stm32f103%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22221.6%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E)%3C%2Ftext%3E%0A%20%20%3Ctext%20class%3D%22ph-title%22%20x%3D%22400%22%20y%3D%22326.0%22%20text-anchor%3D%22middle%22%0A%20%20%20%20%20%20font-family%3D%22system-ui%2Csans-serif%22%20font-size%3D%2272%22%20font-weight%3D%22700%22%3E%EF%BC%88%E4%B8%89%EF%BC%89DAC%E5%AE%9E%E7%8E%B0%E6%B3%A2%E5%BD%A2%3C%2Ftext%3E%0A%3C%2Fsvg%3E)